Vehicle Reference
Overview
The Vehicle system allows creators to create vehicles such as cars, trucks, and even treaded vehicles like tanks. The vehicle system has a lot of customization options, including changing the way vehicles behave and feel by adjusting the physics. This allows for creators to create unique vehicles that feel different for their game.
Types of Vehicles
Four Wheeled Vehicles
Four Wheeled Vehicles provide everything creators need to build 4WD cars, ATVs, and more. This vehicle object includes properties to define the shape of the vehicle, the location and size of the four wheels, physics properties such as mass and center of mass, and driving properties such as max speed, acceleration, and turn radius. The four-wheeled drive model simulates the rotation of the 4 tires on the driving surface.
Treaded Vehicles
Treaded Vehicles can be used to build tanks. Like Four Wheeled Vehicles, creators can define the shape of the collision box, mass, center of mass, and acceleration. The driving model for Treaded Vehicles simulates two tracks that turn independently as the vehicle moves and turns. Treaded Vehicles have two treads instead of four wheels.
Treads are defined by a tread radius, tread width, and tread position. Treaded Vehicles replace turn radius with a turn speed property that controls how quickly the tank can turn.
Vehicle Properties
| Property | Description |
|---|---|
| Max Speed | The maximum potential speed of a vehicle on flat terrain. It is an approximation because the slope of the ground, the acceleration, the friction, mass, and other properties all impact the actual performance of the vehicle. A player should be able to achieve close to the speed set (in cm/sec) with this value.Helpful tip: Multiply MPH by 44.704 and KMH by 27.778 to get CM/sec. |
| Acceleration | The amount of power the engine exerts to get up to max speed. This property is also an estimate since it is also affected by friction, mass, and max speed. This property is closely related to cm/sec^2.Helpful tip: When trying to match a car's 0-60speed, use the formula: desired speed / seconds. For example, a Lamborghini can reach 0-60 in 2.5 seconds. That would be approximately 60 * 44.704 (to convert from MPH to CM/Sec) / 2.5... or an acceleration value of approximately 1,073. |
| Friction | The amount of friction tires or treads have on the ground. The lower the friction, the more the vehicle will slide. The friction of the vehicle also interacts with the friction of the material the vehicle is driving on. Helpful tip: A friction below 1 is very slippery. A friction above 5 is extremely sticky. |
| Brake Strength | The maximum deceleration of the vehicle when stopping. This force is applied every tick until the vehicle is stopped. |
| Coast Brake Strength | The deceleration of the vehicle when not applying gas. A value higher than Brake Strength has no effect. |
| Mass | The resistance of the vehicle to changes in speed in kg. Heavier vehicles require more max speed and acceleration to get going and are affected less by other physics objects and slopes when they have momentum. Lighter vehicles might spin out faster but can get going much faster. |
| Center of Mass Offset | The average position of the mass, offset from the vehicle's position. A low center of mass makes a vehicle stable and hard to flip. A more forward or backwards center of mass can improve handling. Vehicles will flip and rotate around their center of mass. The center of mass is displayed when the vehicle is selected by the sphere helper object. |
| Body Offset and Scale | The collision box of the vehicle. The size of the box should be set with the scale offset and the position relative to the vehicle's pivot. |
| Turn Radius (Four Wheeled Vehicles Only) | The radius, in cm, measured by the inner wheels of the vehicle while making a complete turn. The lower the turn radius, the tighter the turn. The lower the turn radius, the more the wheels are able to turn and the tighter the turn radius. |
| Turn Speed (Treaded Vehicles Only) | The tank's turn speed in degrees/second while moving or the approximate speed while turning in place. Treaded Vehicles turn differently whether they're turning in place or with momentum. When turning in place, the Treaded Vehicle rotates the treads in opposite directions. While moving forward or backwards, the treads will rotate at unequal speeds based on the amount of turning desired. The system blends between these methods based on the amount of speed being applied to the tank at the time. |
Info
Max Speed divided by Acceleration is an estimate of how long it takes to get to full speed.
Driver Properties
| Property | Description |
|---|---|
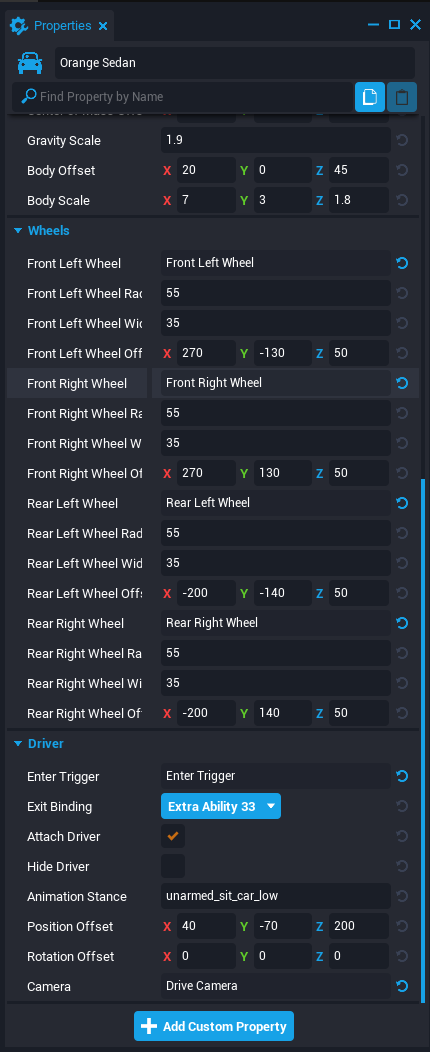
| Enter Trigger | The trigger that a player interacts with to drive the vehicle. |
| Exit Binding | The key binding that a player presses to exit the vehicle. By default, the input assigned is F. |
| Attach Driver | If true, attaches the player to the vehicle when driving. |
| Animation Stance | The animation applied to a player when the player is driving. By default, Four Wheeled Vehicles use unarmed_sit_car_low. If the driver isn't attached, the stance has no impact on the driver. |
| Hide Driver | If true, sets the driver visibility off when driving. If the driver isn't attached, this property has no effect. |
| Position & Rotation Offset | When attached, this adds a position and rotation to the driver relative to the vehicle origin. The blue capsule shows where the driver will be placed. Generally, stances work best when the bottom of the capsule is where the bottom of the character would be when the character is in the stance. |
| Handbrake Binding | The action binding that will activate the handbrake. By default, the handbrake is set to ++SPACE++. The handbrake only causes the rear wheels to brake. Normal braking is done by pressing S and when there is momentum, this will cause all 4 wheels to brake. |
| Camera | The camera that is activated when the vehicle is driven. The camera is disabled when the player exits the vehicle. |
Creating a Four Wheeled Vehicle
Let's explore transforming a prop/model of a car into a fully functional Four Wheeled Vehicle.
Add the Four Wheeled Vehicle to the Project
First, add the base of the physics vehicle to the project.
- In the Core Content window, search
Four Wheeled Vehicle. The first result should be the template to add. Hold left-click on the template and drag it anywhere in your Main Viewport or in the Hierarchy. - Give the template a name. This will refer to it in the future as
Orange Sedan.
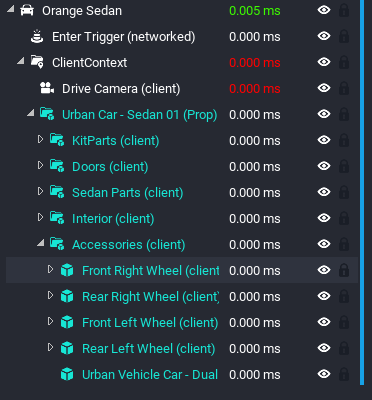
Within the Orange Sedan template, there is a ClientContent. This will contain all of the visuals for the car, such as the body and wheels.
Info
The vehicle should not overlap the Spawn Point to avoid collision issues.
Find and Add a Prop Vehicle to the Orange Sedan
- Find any vehicle in Core Content or Community Content that will be transformed into a functioning vehicle. The examples here use Urban Car - Sedan 01 (Prop).
- Hold left-click on the prop vehicle and drag it into the ClientContext in the Orange Sedan group.
Once the prop vehicle is in the ClientContext, make sure the position of the prop vehicle is 0, 0, 0.
Info
Add the prop vehicle somewhere else in the Hierarchy and then move it into the ClientContext.

Deinstance the Prop Vehicle
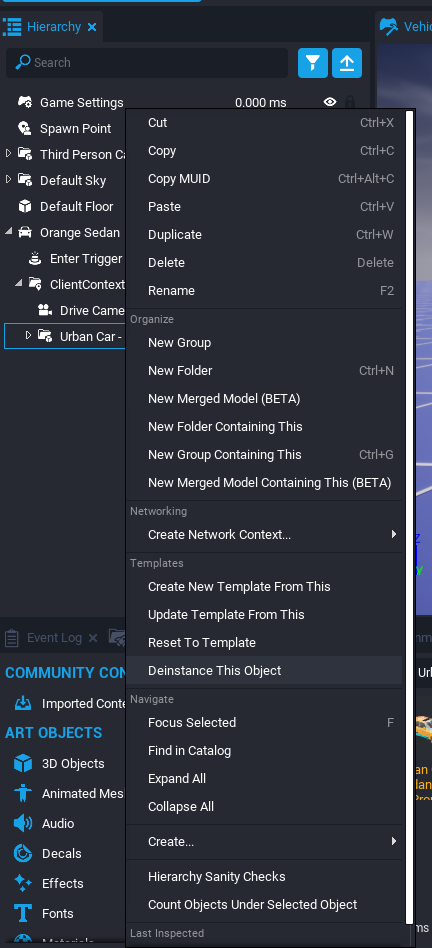
To be able to edit the vehicle, it needs to be deinstanced.
Deinstance the prop vehicle by right-clicking on it then pressing Deinstance This Object.
Connect the Visual Wheels to the Orange Sedan
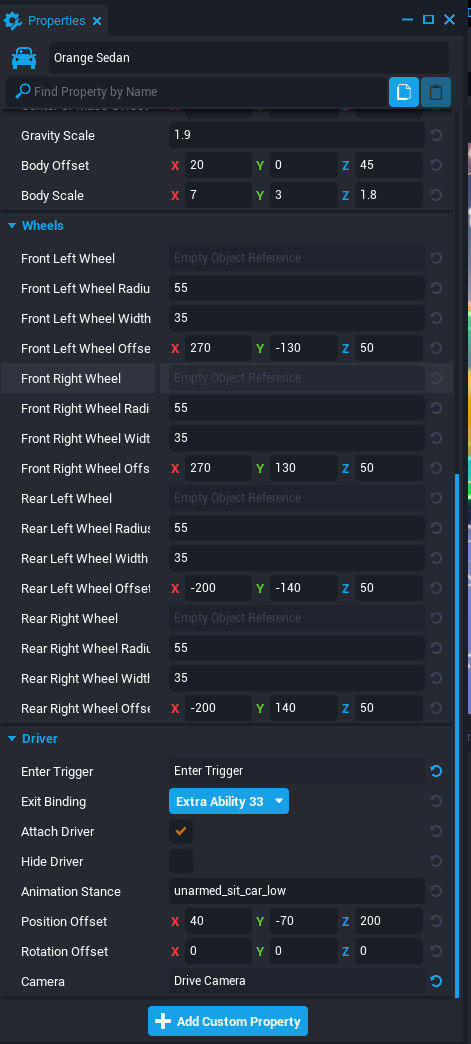
In the Wheels section of the Properties window for the Orange Sedan, there are CoreObjectReferences for each wheel, named Front Left Wheel, Front Right Wheel, Rear Left Wheel, and Rear Right Wheel respectively.
Change the Names of the Visual Wheels
Change the names of each wheel to its respective location on the vehicle, such as Front Left Wheel.
- Find the Accessories group within the prop vehicle.
- For each wheel, look at where it is according to the orientation of the vehicle and change its name accordingly.
Assign the Visual Wheels to the Wheels Properties of the Orange Sedan
Now that each wheel is named, drag-and-drop each wheel into the corresponding property in the Wheels section of the Properties window for the Orange Sedan.
Adjust the Radius, Width, and Offset of Each Wheel
Now that the location and size of the wheels for the Orange Sedan are known, the Wheel Radius, Wheel Width, and Wheel Offset properties for each wheel can be altered as fit.
This has to be determined through trial-and-error and looking at the wheel visually. There is a yellow gizmo for each wheel that visualizes its collision. Try to match this as closely to the visual wheel as possible.
Hint
If there are no gizmos displayed, press V to enable them.

Adjust Vehicle Properties as Deemed Fit
Now that the visual prop is attached to the car and the visual wheels now correspond to the collision wheels, all there is left to do is adjust the other properties of the vehicle such as its Max Speed, Acceleration, Body Scale, and so on.
Test the Vehicle Out
Once everything has been set up, press the Play button and test out the vehicle.
Learn More
Vehicle API Examples | Creating a Racing Game in Core